从 MLA 到 CSA + HCA:DeepSeek 注意力架构的进化之路
结合 vLLM 推理引擎源码,深度解析 DeepSeek V2 → V3 → V3.2 → V4 注意力机制的技术演进。
第一章:注意力机制的显存困局
大模型推理的核心矛盾不是参数多少,而是自回归生成时 KV Cache 对显存带宽的极端压力。每生成一个 token,模型需要重新访问所有历史 token 的 Key 和 Value 向量——这就是 KV Cache 的本质:用空间换时间。
1.1 KV Cache 的数学本质与工程代价
在标准的 Multi-Head Attention(MHA)中,每个 token 在每一层都需要缓存两个向量:Key 和 Value。单请求下 KV Cache 的显存占用公式为:
\[\text{Memory}_{KV} = 2 \times L \times N_{kv} \times d_{head} \times S \times b_{kv}\]其中 $L$ 为层数,$N_{kv}$ 为 KV Head 数,$d_{head}$ 为每头维度,$S$ 为序列长度,$b_{kv}$ 为精度字节数(BF16=2)。
以 Llama-2-70B 为例(80 层、MHA 配置下 64 个 KV 头、每头 128 维、BF16 精度):
- 单 token KV Cache = 2 × 80 × 64 × 128 × 2B = 2.5 MB
- 128K 上下文 = 2.5MB × 131072 = 320 GB
即使 Llama-2-70B 实际使用了 GQA-8(仅 8 个 KV 头),128K 上下文的 KV Cache 仍达约 40 GB——与模型权重本身(FP16 下约 140 GB)在同一量级。KV Cache 不仅占据大量显存空间,更重要的是 —— 在 Decode 阶段,每生成一个 token 都需要从 HBM 中读取全部 KV Cache,形成极大的显存带宽压力。
1.2 传统方案的”砍头”困境:MQA 与 GQA
针对 MHA 的 KV Cache 冗余问题,学术界和工业界先后提出了 MQA 和 GQA 两种 KV 头共享方案:
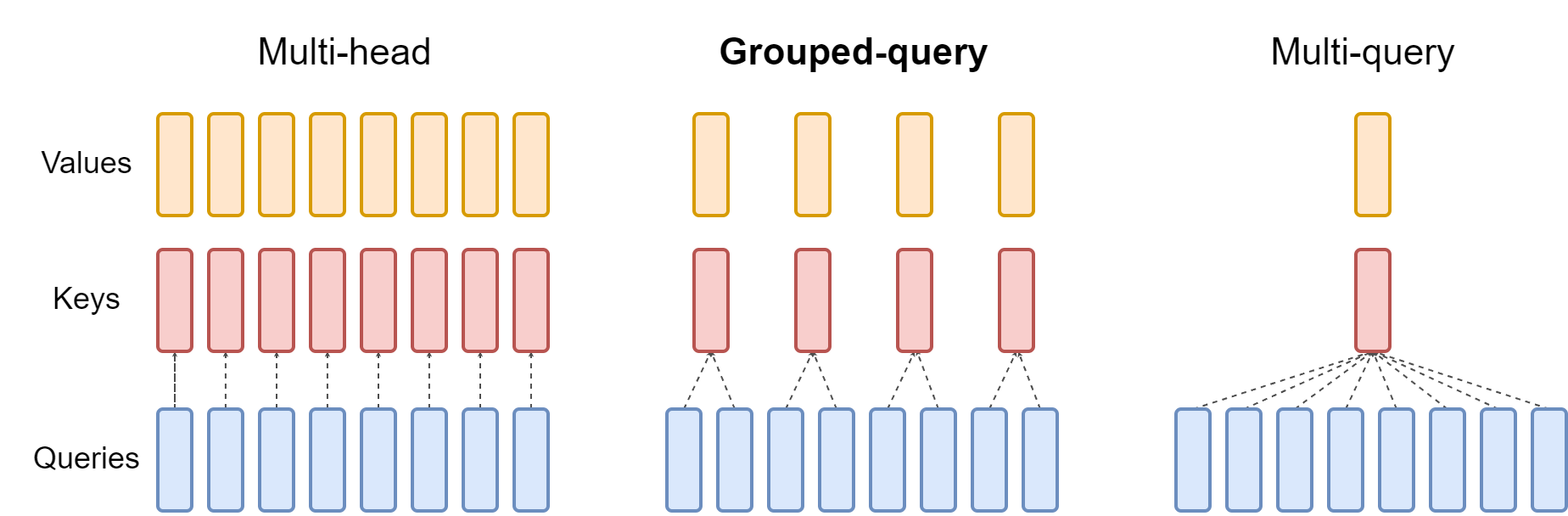
MHA、GQA 与 MQA 的 KV 头共享策略对比(来源:GQA 论文 Figure 1)
| 方案 | 策略 | KV Cache 占比 | 代价 |
|---|---|---|---|
| MHA | 完整 KV 头 | 100% | 基准 |
| GQA-8 | 8 个 Query 头共享 1 个 KV 头 | 12.5% | 质量有损 |
| MQA | 所有 Query 头共享 1 个 KV 头 | 1.6% | 质量损失明显 |
它们的本质都是在 “砍 KV 头” —— 通过减少 K/V 的冗余复制来省显存,但每砍一刀,模型的多头表达能力就损失一分。这是一种线性的权衡,无法做到”既要又要”。
1.3 瓶颈定位:V2/V3 时代,算力过剩而带宽不足
在 8K-128K 的中等上下文区间内,Decode 阶段呈现出典型的 memory-bound 特征:
- 每次 Decode 只生成 1 个 token(batch size 通常也有限)
- 计算量很小(一次矩阵-向量乘法),但需要读取的 KV Cache 数据量巨大
- GPU 的计算单元在”等数据从 HBM 搬过来”
真正的瓶颈不是”算不完”,而是”搬不动”。 这就是 MLA 诞生的背景——它要解决的核心问题是:如何在不损失表达能力的前提下,大幅减少需要从 HBM 读取的 KV 数据量。
第二章:MLA —— 低秩压缩的优雅解法
MLA(Multi-head Latent Attention,多头潜在注意力)是 DeepSeek V2 引入的核心创新。它的核心直觉是:既然瓶颈在”搬运 KV 数据的带宽”,那就不要存完整的 K 和 V,而是存一个低维的”潜在表示”,推理时直接在压缩空间做点积运算。
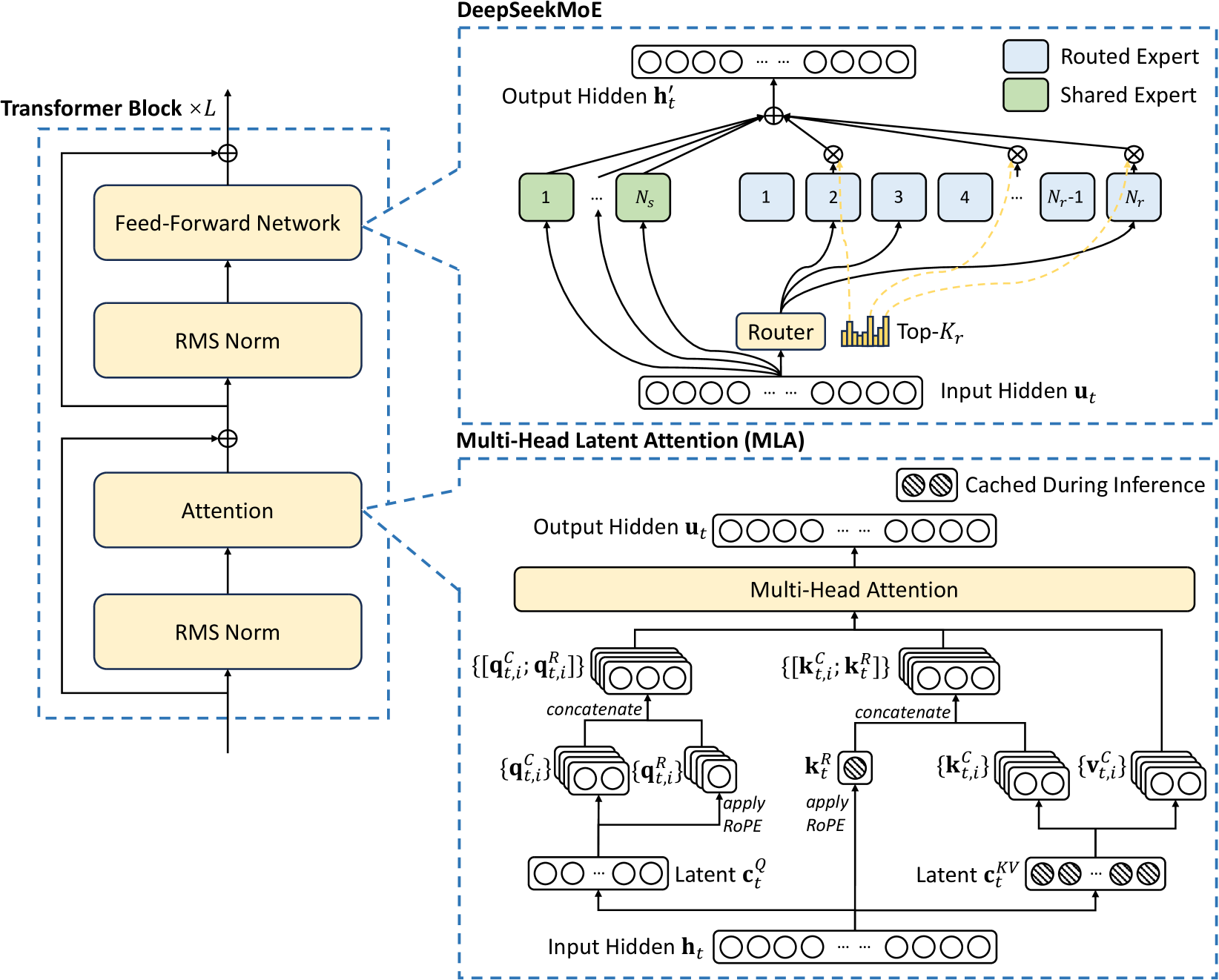
MLA 的 KV 联合压缩架构(来源:DeepSeek-V2 论文 Figure 3)
2.1 压缩与还原:低秩分解的数学框架
MLA 将传统的 KV 计算拆分为压缩(下投影)和还原(上投影)两步:
# 压缩:将高维隐状态投影到低维潜在空间
c_t = x_t @ W_DKV # [hidden_size] -> [kv_lora_rank] 即 H -> Lkv
# 还原:从潜在空间恢复 K 和 V(训练时使用)
k_nope = c_t @ W_UK # [kv_lora_rank] -> [num_heads, nope_dim]
v = c_t @ W_UV # [kv_lora_rank] -> [num_heads, v_dim]
DeepSeek V2/V3 的具体参数:
| 参数 | 值 | 说明 |
|---|---|---|
kv_lora_rank (Lkv) |
512 | 压缩后的潜在维度 |
num_heads (N) |
128 | 注意力头数 |
qk_nope_head_dim (P) |
128 | 每头 K 维度(不含 RoPE) |
qk_rope_head_dim (R) |
64 | RoPE 维度 |
v_head_dim (V) |
128 | 每头 V 维度 |
原始 KV 维度为 128 × 128 = 16384,压缩到 512 维,压缩率达到 96.9%。而 KV Cache 实际存储为 kv_lora_rank + qk_rope_head_dim = 512 + 64 = 576 维,相对于 MHA 的压缩比约为 93.3%。
2.2 “矩阵吸收” —— 推理时永远不需要还原
MLA 最精妙的设计在于:推理的 Decode 阶段根本不需要把 K 和 V 还原回高维空间。
原理是将上采样矩阵 $W_{UK}$ “吸收”进 Query 的投影矩阵中:
# 原始计算路径(训练/Prefill,compute-friendly):
q_nope = q_c @ W_UQ # [Sq, N, P]
k_nope = kv_c @ W_UK # [Skv, N, P]
attn = (q_nope @ k_nope.T) / sqrt(d) # 标准 MHA 点积
# 吸收后的等价计算(Decode,data-movement-friendly):
ql_nope = einsum("snh, lnh -> snl", q, W_UK) # 把 W_UK 吸收进 Q
attn = (ql_nope @ kv_c.T) / sqrt(d) # 直接对压缩向量做点积!
这意味着 Decode 时:
- 不需要从缓存中读取高维的 K 和 V;
- 只需要读取 576 维的压缩向量
[kv_c, k_pe]; - 注意力计算变成了等价于 MQA 的数据搬运量,但保留了 MHA 的表达能力.
这就是 MLA 的核心价值:数据搬运量接近 MQA(极少),但模型质量持平甚至略优于 MHA。
2.3 RoPE 解耦:位置编码的独立处理
旋转位置编码(RoPE)是位置相关的 —— 不同位置的同一个 token,经过 RoPE 后的 K 向量是不同的。这意味着 RoPE 部分无法被压缩到位置无关的潜在空间中。
MLA 的解法是将 K 拆分为两部分:
K = [K_content, K_position]
# K_content: 通过 kv_c 压缩,位置无关
# K_position: 独立计算、独立缓存,仅 64 维
最终 KV Cache 存储的就是 [kv_c (512维), k_pe (64维)],合计 576 维/token —— 这就是 vLLM 中 MLAAttentionSpec 定义的 KV Cache 格式。
2.4 vLLM 中的 MLA 实现全景
vLLM 对 MLA 的实现是工业级的,覆盖了从模型定义到 GPU Kernel 的完整链路。
核心抽象层次:
deepseek_v2.py (模型定义)
└─ MultiHeadLatentAttentionWrapper (MLA 外层:投影+RoPE+O_proj)
└─ MLAAttention (注意力核心:分发到不同后端)
├─ FlashAttn MLA Backend (Prefill + Decode)
├─ FlashMLA Backend (Decode,NVIDIA)
├─ FlashInfer MLA Backend (Prefill + Decode)
├─ CUTLASS MLA Backend (Decode,SM100)
├─ Triton MLA Backend (Prefill + Decode)
└─ ROCm AIter Backend (Prefill + Decode,AMD)
MultiHeadLatentAttentionWrapper.forward() 的关键流程(mla.py):
def forward(self, positions, hidden_states):
# 1. 压缩投影:h_t -> [q_c, kv_lora]
qkv_lora = self.fused_qkv_a_proj(hidden_states)
q_c, kv_lora = qkv_lora.split([q_lora_rank, kv_lora_rank + rope_dim])
# 2. Q 路径:LayerNorm -> 上投影 -> 拆分 nope/rope
q_c = self.q_a_layernorm(q_c)
q = self.q_b_proj(q_c).view(-1, num_heads, qk_head_dim)
# 3. KV 路径:拆分 content/position -> LayerNorm
kv_c, k_pe = kv_lora.split([kv_lora_rank, rope_dim])
kv_c_normed = self.kv_a_layernorm(kv_c)
# 4. 应用 RoPE(仅对 Q 的 rope 部分和 k_pe)
q[..., nope_dim:], k_pe = self.rotary_emb(positions, q[..., nope_dim:], k_pe)
# 5. 核心注意力计算
attn_out = self.mla_attn(q, kv_c_normed, k_pe, output_shape=...)
# 6. 输出投影
return self.o_proj(attn_out)
双路径设计(mla_attention.py):
vLLM 的 MLA 实现区分了两种计算模式:
-
Compute-friendly(Prefill):先把 kv_c 还原为完整的 K 和 V,然后做标准 MHA —— 因为 Prefill 的 Sq/Skv 比接近 1,计算密度高,适合 MHA。
-
Data-movement-friendly(Decode):把 W_UK 吸收进 Q,直接对压缩向量做 MQA —— 因为 Decode 是逐 token 生成,数据搬运是瓶颈。
这种双路径设计是 MLA 工程实现的关键创新,让同一个模型在 Prefill 和 Decode 两个阶段都能达到最优性能。
后端实现矩阵:
| 后端 | 平台 | 阶段 | 特点 |
|---|---|---|---|
| FlashAttn MLA | NVIDIA | Prefill + Decode | 通用基线 |
| FlashMLA | NVIDIA | Decode | 专用高性能 Kernel |
| FlashInfer MLA | NVIDIA | Prefill + Decode | TRT-LLM 内核 |
| CUTLASS MLA | SM100 (Blackwell) | Decode | 新架构优化 |
| Triton MLA | NVIDIA | Prefill + Decode | 可移植 |
| ROCm AIter | AMD | Prefill + Decode | AMD 适配 |
第三章:当上下文到达百万 —— MLA 的隐形天花板
MLA 是对”存储瓶颈”的极致优化,将 KV Cache 的显存占用和读取带宽都降低了 93%+。但它有一个根本性的局限:注意力机制的计算复杂度本质未变。
3.1 从 8K 到 1M:计算量增长 15000 倍
注意力的计算复杂度是 $O(n^2)$——每个 token 都要和所有其他 token 做点积。当上下文长度从 8K 扩展到 1M:
计算量增长 = (1,000,000 / 8,000)² ≈ 15,625 倍
MLA 压缩了每次点积操作的数据量(从 128 维降到等效的低维),但参与运算的 token 对数没有任何减少。100 万个 token 两两配对,依然是 $10^{12}$ 量级的点积运算。
3.2 MLA 的能力边界分析
MLA 的本质是把每个 token 变”瘦”——减小单个 token 的 KV 表示体积。但它没有减少 token 的”数量”。
用一个类比:
- MLA 相当于把仓库里每个包裹从 10kg 压缩到 0.7kg——搬运效率大幅提升;
- 但如果仓库里有 100 万个包裹,快递员依然要跑 100 万趟.
在 8K-128K 的中等长度区间,GPU 的计算能力(FLOPS)是充裕的,瓶颈在带宽 —— MLA 完美适配。但超过某个临界点后,即使带宽问题解决了,纯粹的计算量也会成为不可逾越的墙。
3.3 DeepSeek 的演进逻辑:每代只解决一个核心瓶颈
回顾 DeepSeek 的技术路线,可以看到一条清晰的”瓶颈驱动”逻辑:
| 版本 | 核心瓶颈 | 解决方案 | 结果 |
|---|---|---|---|
| V1 | 验证基础能力 | 标准稠密模型 | 能力基线 |
| V2 | 显存带宽 | MoE + MLA | 推理成本降 90%+ |
| V3 | 训练规模化 | 极致 MoE (671B) | 训练效率突破 |
| V3.2 | 长上下文尝试 | MLA + DSA/NSA | 过渡方案 |
| V4 | 计算复杂度 | CSA + HCA 混合 | 原生 1M token |
当 V4 的目标变成原生支持 1M token 上下文,且预训练数据量达到 33T tokens 时,$O(n^2)$ 就是那堵算力墙。MLA 对此无能为力——它只解决了”存”,没解决”算”。
第四章:V3.2 的过渡尝试——NSA 稀疏索引器
在 V4 全面重设计之前,V3.2 率先尝试了在 MLA 框架内引入稀疏性的方案:Native Sparse Attention(NSA,也称 DSA)。
4.1 核心思路:不是每个 token 都值得关注
NSA 的逻辑很直觉:在处理长序列时,给定一个 Query token,绝大多数历史 token 的注意力权重接近于零——只有极少数 token 是真正”被关注”的。那为什么要对所有 token 都做完整的注意力计算?
NSA 的做法是:先快速”扫描”,找出最相关的 top-k 个 token,只对它们做精确注意力。
4.2 vLLM 中的稀疏索引器实现
vLLM 中 NSA 的实现围绕 SparseAttnIndexer 和 DeepseekV32IndexerBackend 展开。
核心工作流程:
# 1. 维护独立的 FP8 量化 K Cache 用于快速打分
# (比完整 KV Cache 更小,读取更快)
# 2. 对 Query 做投影,计算与所有 K 的相关性
q_fp8 = project_and_quantize(hidden_states)
scores = q_fp8 @ k_cache_fp8.T # 快速粗略打分
# 3. TopK 选择(DeepSeek-V3.2 默认 topk=2048)
topk_indices = fast_topk(scores, k=2048)
# 4. 只对选中的 2048 个 token 做完整 MLA 注意力
output = mla_attention(q, kv_cache[topk_indices])
Indexer 类的关键设计(deepseek_v2.py 中):
- 使用 FP8 量化存储索引用的 K Cache,减少 4 倍存储
- 独立的投影层将 Q latent 向量映射到索引器的 query 空间
- 对 K Cache 应用 LayerNorm,提高打分稳定性
- DeepSeek-V3.2 默认
topk_tokens=2048
DeepseekV32IndexerBackend(indexer.py):
class DeepseekV32IndexerBackend(AttentionBackend):
@staticmethod
def get_name() -> str:
return "DEEPSEEK_V32_INDEXER"
@staticmethod
def get_supported_kernel_block_sizes():
return [1 if current_platform.is_rocm() else 64]
索引器使用 block_size=64 的分页管理,支持 Prefill 分块处理以控制显存峰值。
稀疏 MLA 后端:
在索引器选出 top-k 后,后续的注意力计算交给专用的稀疏 MLA 后端:
FlashMLASparseBackend(NVIDIA)FlashInferMLASparseBackend(with TRT-LLM kernels)ROCMAiterMLASparseBackend(AMD)
4.3 NSA 的局限:仍是 MLA 框架内的补丁
NSA 确实减少了”参与注意力计算的 token 数量”(从 N 降到 2048),但有两个根本性问题:
-
索引器本身仍需扫描全部 KV Cache:
q @ k_cache.T本身就是 $O(N)$ 的操作。虽然比完整注意力的 $O(N \times d)$ 轻量(因为用了 FP8 且维度更小),但对百万 token 场景,这个开销仍然可观。 -
框架约束:NSA 仍然建立在 MLA 的 KV Cache 格式之上,压缩后的 576 维潜在向量依然要全量存储。只是在”读取哪些”上做了优化,并未触及”存了多少”。
这就是为什么 NSA 是一个过渡方案 —— 它证明了稀疏性的价值,但不够彻底。V4 需要更根本的变革。
第五章:V4 的全新解法 —— CSA + HCA 混合架构
V4 不再在 MLA 框架内打补丁,而是从头设计了注意力机制。核心理念包含三个层面:
- 物理压缩 token 数量:不仅把 token 变”瘦”(MLA 的思路),更要把 token 变”少”
- 共享 K=V 向量:K 和 V 使用同一个向量,直接减半 KV Cache 存储
- 逆 RoPE 保持正确性:对注意力输出施加逆旋转,恢复平移不变性
5.1 CSA(Compressed Sparse Attention):精确检索型注意力
CSA 的设计哲学是”温和压缩 + 稀疏选择”,兼顾信息保留和计算效率。
c4a 注意力机制动画演示:压缩、稀疏选择与滑动窗口的协作(来源:vLLM 博客)
三步工作流程:
第一步:压缩(等效 4x):
每个压缩 token 是 8 个未压缩 token 的加权和,步长为 4(即相邻压缩 token 之间有 4 个 token 的重叠)。具体来说,第 $j$ 个压缩 token 覆盖原始位置 $[4j-4, 4j+3]$,RoPE 锚点为位置 $4j$。这不是简单的非重叠分组——重叠窗口确保了压缩边界处不会丢失跨边界信息。
原始序列: [t0, t1, t2, t3, t4, t5, t6, t7, t8, t9, t10, t11, ...]
压缩 token c0: weighted_sum(t[-4]~t[3]) → 锚点位置 0
压缩 token c1: weighted_sum(t[0]~t[7]) → 锚点位置 4 (与 c0 重叠 4 token)
压缩 token c2: weighted_sum(t[4]~t[11]) → 锚点位置 8 (与 c1 重叠 4 token)
由于步长为 4,1M token → 压缩后约 250K 条目(等效 4x 压缩)。
第二步:筛选(Top-k = 512 闪电索引器):
用”闪电索引器”(Lightning Indexer)快速定位最相关的压缩块:
- 用 FP4 精度存储压缩后的索引器 KV(比 FP16 小 4 倍)
- 用 ReLU-scored dot product 计算相关性(比 softmax 快)
- 只保留 top-512 个最相关的压缩 token(V3.2 的 DSA 使用 top-2048)
第三步:局部注意力(滑动窗口 = 128):
保留一个固定大小为 128 的滑动窗口(Sliding Window Attention, SWA),让最近的 token 保持完整的逐 token 注意力。这确保了查询 token 在到达压缩边界之前就能关注到局部信息(解决因果性约束——位置 $i$ 的 token 只能关注第 $j$ 个压缩 token 的条件是 $i \ge 4j+3$)。
CSA 的效果估算:
- 等效 4x 压缩:1M → 250K 压缩 token
- Top-512 稀疏:250K → 512 个相关压缩 token
- 加上 128 个滑动窗口 token = 每个查询关注约 640 个 token
- 相比原始全注意力的 1M token:约 1500x 计算节省
CSA 的意外收获——天然去噪:
在百万 token 上下文中,成千上万无关 token 的微小注意力分数累加会形成巨大的”注意力噪声”,导致模型幻觉。CSA 的 top-k 硬截断充当了天然去噪器——只保留强信号,彻底切断噪声源。
5.2 HCA(Heavily Compressed Attention):全局语义型注意力
HCA 采用了更激进的压缩策略,但放弃了稀疏选择,转而保持”几乎全量”的注意力。
设计逻辑:
- 压缩比 128x:每个压缩 token 是 128 个未压缩 token 的加权和,步长为 128(无重叠)。第 $j$ 个压缩 token 覆盖位置 $[128j, 128j+127]$,锚点为 $128j$;
- Top-k = 8192(等效全注意力):1M token 压缩后仅约 8K 条目,直接设 top-k=8192 即可覆盖全部压缩 token,实现上仍可视为稀疏注意力框架;
- 信息损失更大:但足以捕捉全局语义模式和长程主题结构.
HCA 的计算量:$O(n \times n/128) = O(n^2/128)$,相比原始 $O(n^2)$ 降低了 128 倍。由于 top-k=8192 能覆盖全部压缩 token,HCA 实质上是对全局信息的稠密注意力,不会遗漏任何全局语义。
5.3 CSA vs HCA:互补的设计哲学
| 特性 | CSA / c4a(压缩稀疏注意力) | HCA / c128a(重压缩注意力) |
|---|---|---|
| 压缩方式 | 8 token 加权和,步长 4(等效 4x) | 128 token 加权和,步长 128(128x) |
| 选择策略 | 稀疏(top-512) | 全注意力(top-8192 覆盖全部) |
| 信息保留 | 精确检索能力 | 全局语义捕捉 |
| 计算节省 | ~1500x(压缩 + 稀疏) | ~128x(仅压缩) |
| 适用场景 | 精确查找、长距离依赖 | 全局理解、主题摘要 |
| 代价 | 需要索引器、可能漏信息 | 信息损失更多 |
5.4 混合策略与层级分配
V4 共 61 层注意力,具体分配为 30 个 c4a 层 + 31 个 c128a 层:
- c128a 层(31 层):提供全局语义覆盖,每层通过 128x 压缩 + top-8192 实现对全序列的稠密注意力;
- c4a 层(30 层):提供精确检索能力,每层通过 4x 压缩 + top-512 稀疏选择定位关键信息;
- 所有层均带有 128-token 滑动窗口:确保局部信息始终可达.
这种设计的逻辑是清晰的:
- c128a 层建立”全局地图”:理解整篇文档的主题结构;
- c4a 层做”精准定位”:在全局理解的基础上检索具体事实.
这类似人类的阅读策略:先速览全文(c128a),再精读关键段落(c4a)。在百万 token 的数据海洋中,先有方向感,再做精确检索。
5.5 vLLM 中的 V4 实现架构
V4 在 vLLM 中的实现引入了全新的组件体系,与 V2/V3 的 MLA 框架有本质区别。
关键设计创新——共享 K=V + 逆 RoPE:
V4 的一个核心突破是 K 和 V 共享同一个向量(即 K=V),这直接将 KV Cache 内存减半(2x 节省)。但共享会引入问题:对 K 施加 RoPE 后,注意力输出会携带绝对位置信息,破坏平移不变性。解决方案是在注意力输出端应用逆 RoPE(inverse RoPE):
\[R(-i) \cdot a_i = \sum_p w_p \cdot R(j_p - i) \cdot k_{j_p}\]逆 RoPE 后,输出只包含相对位置 $R(j_p - i)$,恢复了平移不变性。这在 vLLM 中体现为融合算子 fused_inv_rope_fp8_quant。
三种层类型(sparse_swa.py):
_LAYER_TYPE_SWAONLY = "swaonly" # 纯滑动窗口(compress_ratio=1)
_LAYER_TYPE_C4A = "c4a" # CSA 层(compress_ratio=4)
_LAYER_TYPE_C128A = "c128a" # HCA 层(compress_ratio=128)
模型共 61 层:30 个 c4a 层 + 31 个 c128a 层。每种层类型有独立的 FlashMLA tile-scheduler 计划,同类型的所有层在同一步内共享调度元数据。
DeepseekV4MultiHeadLatentAttentionWrapper 的核心结构:
class DeepseekV4MultiHeadLatentAttentionWrapper(PluggableLayer):
def __init__(self, ...):
# 核心注意力层
self.mla_attn = DeepseekV4MLAAttention(...)
# 压缩器(仅 compress_ratio > 1 的层)
self.compressor = DeepseekCompressor(
compress_ratio=self.compress_ratio, # 4 或 128
hidden_size=self.hidden_size,
head_dim=self.head_dim,
) if self.compress_ratio > 1 else None
# 滑动窗口 KV Cache(所有层都有)
self.swa_cache_layer = DeepseekV4SWACache(
head_dim=self.head_dim,
window_size=self.window_size,
dtype=torch.uint8, # FP8 存储
)
DeepseekCompressor 的工作流程(deepseek_compressor.py):
class DeepseekCompressor(nn.Module):
def forward(self, x, positions, rotary_emb):
# 1. 投影:获取 KV 和 Gate Score
kv_score = cublas_gemm_bf16_bf16_fp32(x, self.fused_wkv_wgate.weight)
kv, score = kv_score.split([coff * head_dim, coff * head_dim])
# 2. 加入位置编码(APE),存入状态缓存
_save_partial_states_kernel(kv, score, self.ape, positions, state_cache, ...)
# 3. 每累积 compress_ratio 个 token,触发融合 Kernel:
# 压缩 → RMSNorm → RoPE → FP8 量化 → KV Cache 写入
self._fused_kernel(state_cache, kv_cache, cos_sin_cache, ...)
压缩器维护一个 CompressorStateCache,为每个序列缓存最近 compress_ratio 个 token 的中间状态。当积累够 4 个(CSA)或 128 个(HCA)token 后,触发融合 Kernel 一次性完成压缩→归一化→RoPE→量化→写入的全流程。
DeepseekV4SWACache 的 KV Cache 格式:
# FP8 格式:584B/token
# = 448B (NoPE, FP8) + 128B (RoPE, BF16) + 8B (FP8 scale)
head_bytes = (
nope_head_dim # 448 fp8 NoPE
+ rope_head_dim * 2 # 64 bf16 RoPE (128 bytes)
+ nope_head_dim // 64 # 7B scale factors
+ 1 # 1B padding
) # = 584 bytes total
三路并行执行(attention_impl 方法中):
V4 的注意力层在执行时通过 CUDA 多流实现三个操作的并行重叠:
def attention_impl(self, hidden_states, qr, kv, positions, out):
if self.indexer is not None:
# 有索引器的层:索引器在默认流,KV插入+压缩在辅助流
maybe_execute_in_parallel(
lambda: indexer(hidden_states, qr, positions, ...), # 默认流
lambda: (kv_insert(q, kv, positions, ...) + # 辅助流
compressor(hidden_states, positions, ...)),
event_0, event_1, aux_stream
)
elif self.compressor is not None:
# 仅有压缩器:压缩在默认流,KV插入在辅助流
maybe_execute_in_parallel(
lambda: compressor(hidden_states, positions, ...), # 默认流
lambda: kv_insert(q, kv, positions, ...), # 辅助流
event_0, event_1, aux_stream
)
第六章:工程细节——量化与融合算子的极致优化
V4 的效率提升不仅来自宏观的架构设计,更来自对每一个微观计算环节的极致工程优化。
6.1 FP8/FP4 量化在注意力中的创新应用
V4 在注意力流程中全链路使用低精度量化,不同环节使用不同精度:
| 环节 | 精度 | 理由 |
|---|---|---|
| SWA KV Cache | FP8 (E4M3) | 逐 token 注意力需要精度 |
| 闪电索引器 K Cache | FP4 / MXFP4 | 只做相对排序,容错率极高 |
| CSA 压缩后 KV | FP8 + UE8M0 scale | 压缩已损失信息,FP8 足够 |
| O 投影 | FP8 einsum | 高维投影可容忍精度损失 |
| MoE 专家权重 | MXFP4 | 稀疏激活降低精度需求 |
| RoPE 位置编码 | BF16 | 位置信息需要保持精度 |
关键洞察:CSA 的闪电索引器不需要”重建”数据,它只是在计算各个压缩块的相对关联度排序。排序操作的容错率极高——即使分数有量化误差,只要相对大小关系正确,top-k 的结果就是对的。这就让 FP4 这样的极低精度在注意力机制中成为可能。
6.2 Fused Kernel 设计:减少内存往返
V4 引入了大量融合算子,将多步操作合并为单次 Kernel 启动:
fused_deepseek_v4_qnorm_rope_kv_insert(477 行 CUDA):
Q 侧: per-head RMSNorm(无权重) + GPT-J RoPE
KV 侧: GPT-J RoPE + UE8M0 FP8 量化 + 分页 Cache 写入
─── 单次 Kernel 完成 ───
fused_compress_quant_cache(584 行 Triton):
读取状态缓存 → softmax-gated 压缩 → RMSNorm → RoPE → FP8 量化 → KV Cache 写入
─── 单次 Kernel 完成 ───
topk_softplus_sqrt(714 行 CUDA):
MoE 路由的 softplus 激活 + sqrt + TopK 选择
─── 单次 Kernel 完成 ───
这些融合算子的设计原则是:任何中间结果如果可以留在寄存器/共享内存中而非写回 HBM,就应该被融合。在百万 token 场景下,减少 HBM 往返次数带来的收益是巨大的。
6.3 压缩槽位映射:分页系统的适配
V4 的压缩机制需要与 vLLM 的分页 KV Cache 管理系统适配。compressor_utils.py 中的 _compressed_slot_mapping_kernel 负责将压缩后的 token 正确映射到物理页面:
# 核心逻辑:只有每 compress_ratio 个 token 的最后一个才触发写入
is_valid = (pos + 1) % COMPRESS_RATIO == 0
pos_after_compress = pos // COMPRESS_RATIO
block_ids = pos_after_compress // block_size
slot_ids = block_numbers * block_size + pos_after_compress % block_size
这意味着 CSA 层(compress_ratio=4)每 4 个 token 才产生一个 KV Cache 条目,HCA 层(compress_ratio=128)每 128 个 token 才产生一个。物理存储开销急剧下降。
6.4 O 投影的创新:逆 RoPE + FP8 Einsum + 分组低秩
V4 采用 K=V 共享(同一个向量既作 Key 又作 Value),带来 2x 内存节省。但 RoPE 作用于 K 后,注意力输出会携带绝对位置 $R(j_p)$,破坏平移不变性。解决方案是在输出端施加 $R(-i)$(逆 RoPE),使输出只含相对位置 $R(j_p - i)$。
V4 的输出投影采用了三级流水线设计:
# 1. 逆 RoPE + FP8 量化(融合 Kernel)
o_fp8, o_scale = fused_inv_rope_fp8_quant(
o, positions, cos_sin_cache,
n_groups=n_local_groups, # 分组
heads_per_group=heads_per_group,
nope_dim=nope_head_dim,
rope_dim=rope_head_dim,
)
# 2. FP8 Einsum:o_proj 的第一级(降维)
# "bhr,hdr->bhd" : [batch, heads, head_dim] × [heads, dim, rank] -> [batch, heads, rank]
fp8_einsum("bhr,hdr->bhd", (o_fp8, o_scale), (wo_a_fp8, wo_a_scale), z)
# 3. 第二级线性投影(恢复到 hidden_size)
output = self.wo_b(z.flatten(1))
这里 wo_a 是分组低秩投影(o_lora_rank),wo_b 是恢复投影——与 MLA 的压缩→还原思路异曲同工,但应用在了输出端。
第七章:V4 的 KV Cache 量化对比
根据 vLLM 官方博客的精确计算:在 1M token、BF16 KV Cache 下,V4 的 KV Cache 仅需 9.62 GiB,相比 V3.2 风格 61 层堆栈的 83.9 GiB 节省了约 88.5%。
以下是详细推导(来自 vLLM 博客附录):
V3.2 的 KV Cache(61 层,BF16):
每层每 token:
MLA 缓存: (512 + 64) × 2 = 1152 bytes
索引器缓存: 128 × 2 = 256 bytes
合计: 1408 bytes/token/layer
1M token (1,048,576):
每层: 1,048,576 × 1408 ≈ 1.375 GiB
61 层总计: ≈ 83.9 GiB
V4 的 KV Cache(30 c4a + 31 c128a 层,BF16,共享 K=V):
每个共享 KV 缓存条目: 512 × 2 = 1024 bytes(K=V 共享,无需分别存储)
每个 c4a 索引器条目: 128 × 2 = 256 bytes
c4a 层(30 层):
共享 KV: (128 + 1,048,576/4) × 1024 bytes(128 为 SWA)
索引器: (1,048,576/4) × 256 bytes
每层合计: ≈ 320.1 MiB
c128a 层(31 层):
共享 KV: (128 + 1,048,576/128) × 1024 ≈ 8.1 MiB 每层
总计: 30 × 320.1 MiB + 31 × 8.1 MiB ≈ 9.62 GiB
压缩来源分解:
| 节省因素 | 贡献 |
|---|---|
| 共享 K=V(无需分别存储 K 和 V) | 2x |
| c4a 压缩(步长 4) | 4x(在 30 层) |
| c128a 压缩(步长 128) | 128x(在 31 层) |
| 综合效果 | 83.9 → 9.62 GiB(~8.7x 节省) |
实践中,vLLM 还对索引器缓存使用 FP4、对注意力缓存使用 FP8,可将实际 KV Cache 大小进一步缩减约一半。
第八章:技术权衡与未来展望
8.1 MLA vs CSA+HCA:不是替代,是互补
回顾两种方案的本质:
| 维度 | MLA | CSA+HCA |
|---|---|---|
| 核心策略 | 把 token 变”瘦” | 把 token 变”少” |
| 解决的瓶颈 | 内存带宽 | 计算复杂度 |
| 适用区间 | 8K-128K | 128K-1M+ |
| 信息损失 | 理论无损(低秩近似) | 有损(压缩+截断) |
| 实现复杂度 | 中等 | 高 |
两者并非不可调和。未来的最优方案可能是:先用 MLA 压缩每个 token 的表示(减小体积),再用 CSA/HCA 减少参与计算的 token 数量(减少数量)——双管齐下。
事实上,V4 的 SWA Cache 中每个 token 仍然只存储 584B(含 FP8 量化),这本身就包含了”压缩单 token 体积”的思想。MLA 的精神并未完全消失,只是换了一种形式存在。
8.2 V4 的复杂度代价
V4 是一个在时间压力下的”工程优先”方案。它堆叠了大量新技术:
- CSA + HCA 混合注意力
- mHC(Manifold-Constrained Hyper-Connections)替代残差连接
- Engram 记忆机制
- Muon 优化器
- 三种不同类型的层(swaonly/c4a/c128a)各自独立的元数据管理
- 多 CUDA Stream 并行执行
DeepSeek 自己在技术报告中坦诚:
“为了追求极致的长上下文效率,DeepSeek V4 采用了大胆的架构设计。为了最小化风险,我们保留了许多已验证的组件和技巧,这使得架构相对复杂。在未来的迭代中,我们将进行更全面的研究,将架构精简到最核心的设计。”
8.3 V5 的可能方向
基于当前的技术趋势和 DeepSeek 的演进逻辑,可以推测几个可能方向:
方向一:统一 CSA 和 HCA:
当前两种机制需要交替使用,增加了工程复杂度。未来可能找到一种自适应压缩机制——根据 Query 和上下文的关系动态决定压缩粒度。
方向二:MLA 回归:
CSA/HCA 把 token 数量变少,MLA 把单体 token 变瘦。两者组合可能是终极方案。
方向三:更激进的量化:
从 FP16 → FP8 → FP4 的趋势来看,FP2 甚至 1-bit 可能是下一步。微软的 BitNet 研究已经证明了极低精度的可行性。
方向四:SSM 混合:
Qwen 的 SSM + Attention 混合路线(类似 Mamba-2 + Attention 交替层)证明了可行性。线性复杂度的 SSM 可能替代 HCA 的”全局语义捕捉”角色。
8.4 核心启示
技术选型没有绝对的优劣,只有是否匹配当下最紧迫的瓶颈。
- 当瓶颈是带宽时,MLA 是最优解
- 当瓶颈是计算量时,CSA+HCA 是更优解
- 当两者都是瓶颈时,它们的组合才是终极答案
能够在正确的时间果断放弃自己曾经引以为傲的核心技术,本身就是一种顶级的进化能力。因为它意味着你极其清醒地知道——过去做对了什么,而现在又需要什么。
附录:vLLM 中 DeepSeek 注意力实现速查表
A.1 模型版本与注意力机制映射
| 模型版本 | 注意力机制 | 核心文件 | KV Cache 格式 | 适用场景 |
|---|---|---|---|---|
| V2/V3 | MLA | mla_attention.py, mla.py |
576B (BF16) | 8K-128K |
| V3.2 | MLA + NSA | sparse_attn_indexer.py, indexer.py |
576B + FP8 索引 K | 128K+ |
| V4 | CSA+HCA+SWA | deepseek_v4_attention.py, deepseek_compressor.py, sparse_swa.py |
FP8 SWA (584B) + 压缩 | 1M |
A.2 关键源码文件索引
MLA 相关:
- 核心抽象:
vllm/model_executor/layers/attention/mla_attention.py(2723 行) - 外层封装:
vllm/model_executor/layers/mla.py(177 行) - 模型集成:
vllm/model_executor/models/deepseek_v2.py(1609 行) - 后端实现:
vllm/v1/attention/backends/mla/(10 个后端文件) - CUDA Kernel:
csrc/attention/mla/(CUTLASS SM100) - CPU 实现:
csrc/cpu/mla_decode.cpp
NSA/稀疏相关:
- 索引器层:
vllm/model_executor/layers/sparse_attn_indexer.py - 后端管理:
vllm/v1/attention/backends/mla/indexer.py - 稀疏后端:
vllm/v1/attention/backends/mla/flashmla_sparse.py - TopK Kernel:
csrc/topk.cu
V4 相关:
- 注意力层:
vllm/model_executor/layers/deepseek_v4_attention.py(1076 行) - 压缩器:
vllm/model_executor/layers/deepseek_compressor.py - SWA Cache:
vllm/v1/attention/backends/mla/sparse_swa.py - 压缩工具:
vllm/v1/attention/backends/mla/compressor_utils.py - 融合算子:
csrc/fused_deepseek_v4_qnorm_rope_kv_insert_kernel.cu(477 行) - V4 Ops:
vllm/v1/attention/ops/deepseek_v4_ops/(5 个 Triton 文件) - 模型定义:
vllm/model_executor/models/deepseek_v4.py(1437 行)
A.3 DeepSeek V3 的 MLA 关键参数
# 来源:vLLM mla_attention.py 注释和 benchmark configs
num_q_heads = 128 # Query 头数
num_kv_heads = 1 # MLA 等效为单 KV 头
kv_lora_rank = 512 # KV 潜在空间维度 (Lkv)
qk_nope_head_dim = 128 # Q/K 不含 RoPE 的维度 (P)
qk_rope_head_dim = 64 # Q/K RoPE 维度 (R)
v_head_dim = 128 # V 头维度
q_lora_rank = 1536 # Q 潜在空间维度 (Lq)
head_dim = 576 # 总 head_dim = Lkv + R = 512 + 64
A.4 DeepSeek V4 的 CSA/HCA 关键参数
# 来源:vLLM sparse_swa.py 和 deepseek_v4_attention.py
compress_ratios = [1, 4, 128] # 三种层类型
num_layers = 61 # 30 c4a + 31 c128a
head_dim = 512 # V4 的 head dimension (K=V 共享)
nope_head_dim = 448 # 不含 RoPE
rope_head_dim = 64 # RoPE 维度
window_size = 128 # SWA 滑动窗口大小
# 稀疏注意力 top-k:
c4a_top_k = 512 # CSA 层的 top-k(V3.2 DSA 为 2048)
c128a_top_k = 8192 # HCA 层的 top-k(覆盖 1M/128=8K 全部条目)
# 关键创新: K=V 共享 + 逆 RoPE
shared_kv = True # K 和 V 使用同一向量(2x 内存节省)
inverse_rope_on_output = True # 注意力输出应用 R(-i) 恢复平移不变性
# SWA Cache 格式 (FP8, 584B/token):
swa_bytes_per_token = 448 + 128 + 8 # NoPE(FP8) + RoPE(BF16) + scale
# CSA 层 (compress_ratio=4):
c4a_block_size = 4 # 状态缓存页大小
c4a_sliding_window = 8 # coff * compress_ratio (重叠窗口 8 token)
# HCA 层 (compress_ratio=128):
c128a_block_size = 8 # 状态缓存页大小
c128a_sliding_window = 128 # coff * compress_ratio
参考
- DeepSeek-V2 技术报告:https://arxiv.org/abs/2405.04434
- vLLM 项目源码:https://github.com/vllm-project/vllm (2026年5月8日)
- DeepSeek-V4 技术报告(2026年4月):https://huggingface.co/deepseek-ai/DeepSeek-V4-Pro/blob/main/DeepSeek_V4.pdf
- FlashMLA 开源实现:https://github.com/deepseek-ai/FlashMLA
- vLLM DeepSeek V4 官方博客:https://vllm.ai/blog/deepseek-v4